palletizer robot relate
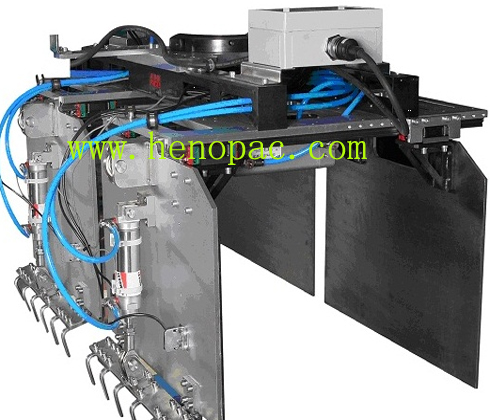
case double palletizer robot gripper
- Product description: Bag Gripper end effectors offer end-of-line, pick-and-place palletizing solutions.carton box palletizer robot gripper case robot gripper
carton box palletizer robot gripper palleting robot system case robot gripper
brown corrugated case double palletizer robot gripper
In many industries, not only bagged goods need to be palletised, but also cartons, cardboard boxes, crates or canisters. HENOPAC company has developed flexible robotic palletisers with gripper elements to meet the different requirements of these items. The HENOPAC palletizer robot sysem ensures firstclass stack quality, gentle product handling and high reliability.Do you have a detailed inquiry regarding our palletising solutions?
Simply use our inquiry form. We will contact you as soon as possible.
To the inquiry form
Innovative palletising technology with state-of-the-art technology
The HENOPAC palletizer robot sytem palletises and depalletises various types of packages using specifically developed gripper elements. The HENOPAC interface control ensures a user-friendly handling, as well as a flexible adjustment to changing conditions of use. Even complex processes with varying basic parameters can be solved in a reliable and efficient way.
HENOPAC paleltizer robot systems feature energy efficiency and maximum accuracy when the layers are formed on pallets. They are also suitable for bagged products and can be reconfigured very easily for frequent product changes.
• High flexibility for various tasks
• Little floor space required due to compact design
• Exchangeable grippers for picking up various packaged goods
• Simple change of the packing pattern – at the touch of a button or fully automatic through barcode recognition
• Up to 1,900 units per hour, depending on the model
• Reliable, even under extreme conditions
HENOPAC paleltizer robot systems can be equipped with different grippers. This ensures high flexibility. You can palletise different sized load units on the same pallet using gripping systems that can stack packages from above into available gaps.
Fork gripper
Whether handling bagged goods or cardboard boxes: the fork gripper ensures reliable, gentle and precise stacking of both product types. It can handle up to 600 units per hour.
Double fork gripper
The powerful double fork gripper stacks bagged goods and cardboard boxes with a capacity of up to 900 units per hour; this is also possible by moving two units per travel path.
Finger gripper
The finger gripper is a high capacity tool for stable bags. It can palletise up to 1,200 bags per hour.
Double finger gripper
The double finger gripper is used if large quantities of stable bags need to be palletised. It can position up to 1,900 bags per hour for the palletising process.
Pallet gripping device
The installation of a pallet gripping device allows for feeding the empty pallets without an additional empty pallet conveyor.
Suction gripper
The suction gripper is recommended for bundles with suctionable surfaces: it can stack up to 400 bundles per hour while gently handling the product. Even unstable packaged goods can be palletised reliably.
Parallel gripper
The parallel gripper performs especially well when palletising stable bundles with parallel side walls, i.e. cardboard boxes: it can stack up to 600 cardboard boxes per hour.
Special gripper
For individual requirements, special gripping systems are developed and dimensioned for the specific products and performance characteristics.
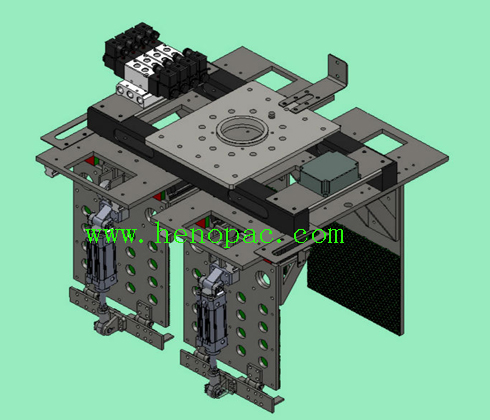
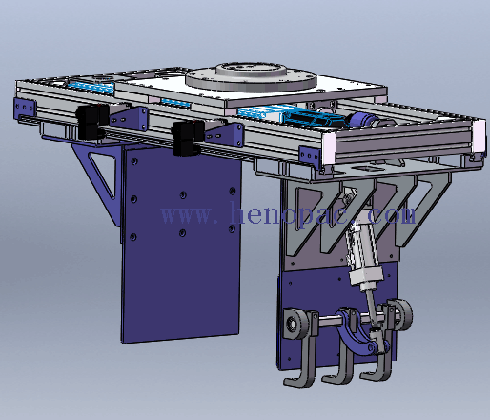
The HENOPAC carton box Gripper end effectors offer end-of-line, pick-and-place palletizing solutions. The henopac case Gripper utilizes a simplified, field adjustable, lightweight design to provide our customers with the fastest, most reliable case Gripper available today.
Used for Brown corrugated box Palletizing
Bag size range 10-50kg Corrugated box
Packing speed 12-15 Cartons/min
Carton size range L200-480xW250-350xH200-400mm
Machine Dimension L450xW500x450mm
Fit for robot type palletizer robot
ABB IRB460 ABB IRB660
KUKA KR 700 PA
Yasakawa motorman-MH110 MH180 MH180-120
Fanuc M-410iB/M-410iC
Kawasaki CP180L CP300L
Nachi LP130/180/210-01
Weight of gripper 40kg
Pneumatic components SMC/Japan
Material Aluminum alloy
Option High speed exchange gripper
Categories
- semi-auto stretch wrapper
- fully auto stretch wrapper
- pallet strapping machine
- automatic edgeboard applicator
- High speed tray former
- case erector
- Bag-in-box maker & inserter
- case packer
- Bag sealing and fold machine
- case sealer
- pallet dispenser/pallet magazine
- palletizer robot system
- pallet handing solutions
- palletizer robot relate
- mask machine
- mask packing machine
Latest News
Contact Us
Contact: David lee
Phone: +86 18680322634
Tel: 86-755-21508489
Add: Junyi Industries area, Lixin South Road, Foyong,Bao an District, Shenzhen, China
 henopac
henopac henopac
henopac